| |
| |
|
電子工程網
標題: DW1000分享資料 [打印本頁]
作者: DN1139 時間: 2021-12-2 17:29
標題: DW1000分享資料
近些年來隨著物聯網和機器人技術的大發展,精確定位技術的熱度也隨之攀升。目前精確定位的技術有很多,如基于wifi、RFID、zigbee、超聲波、UWB等技術都可以實現精準定位。由于技術的不同,精度也不盡相同,造假也不同。本文將講述基于超寬帶技術的定位系統的技術實現框架和流程,由于本文主要參考DECAWAVE公司出品的DW1000芯片相關技術問題,因此對DW1000芯片實現產品化具有推動作用。
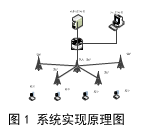
系統框架
技術DW1000芯片的定位技術主要包括錨站、標簽、應用服務器和數據庫
錨站:錨站與標簽進行無線通信,接收來自標簽的接入請求信息、位置更新POLL信息、位置更新FINAL信息,并對接入信息和POLL信息進行響應。同時將位置更新FINAL信息回傳給解算服務器;從錨站與主錨站進行通信進行信息交互;
標簽:標簽與錨站進行無線通信,發送接入請求信息、位置更新POLL信息、位置更新FIANL信息給錨站,并在FINAL信息中加入標簽電量等信息,同時對POLL響應信息進行響應,反饋為位置更新FINAL信息。
應用服務器:該服務器接收來自主錨站的含標簽ID的位置更新信息,根據相關參數,如距離、速度等,計算出位置信息,并連同解析的標簽電量信息寫入數據庫。其中電量更新頻率可以按設定的周期來更新;同時提供在導入的地圖上進行標簽跟蹤,路徑回訪等功能。
數據庫服務器:該服務器供解算服務器、錨站、標簽等數據寫入功能。
關鍵技術
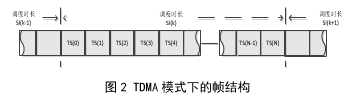
TS分配技術:多址技術
DW1000的芯片提供兩種多址方式TDMA和CDMA方式,本文著重分析TDMA模式。TDMA模式下,DW1000支持頻分1/2/3/4/5/7共6個通道,但實際操作過程中6個通道由于存在頻率干擾,致使不可同時應用。單通道下,根據處理機制不同,可將空口時間片進行切割形成時隙 TS,每個時隙分給一個固定的標簽使用,如圖所示。如果時隙是共享模式,在標簽進入休眠狀態,該時隙進行資源釋放,可供其他標簽使用;若在獨享模式下,不論標簽是否進入休眠,該時隙也將不分配給其他用戶;僅當標簽硬件在系統中進行銷毀時,時隙資源方可回收。
TOF(time of flight)位置更新流程設計
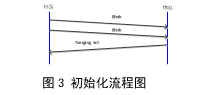
如圖3 所示,該原理圖中信息交互點較少,主要集中在空口信息交互。本節針對空口交互流程進行分析,包含接入初始化,位置更新等。本文針對decawave廠家未給出異常處理流程,提出了異常處理流程,從而完成系統性的完善和優化。
初始化流程:標簽加電后,系統進入錨站搜索流程,發起初始化信息Blink,等待錨站回應,錨站回應Ranging Init息,標簽按照Response 消息進行初始配置,如時隙、喚醒周期等。此后,標簽進入位置更新流程。
位置更新流程:在該狀態下標簽已擁有自己專屬的通信時隙,以two-way ranging模式為例,位置更新流程為如下。首先標簽發起POLL信息給臨近的三個錨站,并記錄初始時間ti(第i次更新)三個錨站收到POLL信息并在規定的時隙內反饋給標簽(記錄trelay通常是系統常數),標簽收到反饋消息,并記錄每個錨站通信的時間差tj(第j個錨站),時間差魚無線電波傳輸速率乘積即為標簽與錨站的距離。標簽將三個距離信息打包回傳給主錨站,主錨站回傳給后臺數據庫,解算模塊利用距離信息計算出本次標簽位置更新信息,并寫入數據庫,完成位置更新。
標簽POLL消息發起的時間為標簽時刻Tt0,i,發起的地點為(x,y,z)。當第i個錨站(xi,yi,zi)收到POLL消息為Ta0,i,錨站處理后發送Response信息給標簽時刻為Tal,i,標簽收到錨站Response信息時刻為Ttl,i。定義Trelay為錨站處理常數:Trelay=Tal,i-Ta0,i。
| 歡迎光臨 電子工程網 (http://www.4huy16.com/) |
Powered by Discuz! X3.4 |